LAPORAN AKHIR DEMO PROJECT
ADAPTIVE TRAFFIC LIGHT SYSTEM
1. Pendahuluan [Kembali]
Sistem lampu lalu lintas merupakan infrastruktur krusial dalam manajemen lalu lintas perkotaan, dirancang untuk mengatur aliran kendaraan dan pejalan kaki demi keselamatan dan efisiensi. Secara historis, sistem ini telah berevolusi dari pengaturan manual menjadi sistem konvensional berbasis waktu tetap. Namun, tantangan mobilitas modern, seperti peningkatan volume kendaraan dan urbanisasi yang pesat, menuntut inovasi lebih lanjut untuk mengatasi kemacetan dan inefisiensi yang semakin parah.
Sistem lampu lalu lintas konvensional memiliki beberapa keterbatasan mendasar yang menyebabkan inefisiensi signifikan dalam manajemen lalu lintas perkotaan. Keterbatasan ini mencakup pemborosan waktu yang tidak perlu bagi pengguna jalan dan kurangnya kemampuan pengawasan yang berkelanjutan.
Sistem lampu lalu lintas konvensional umumnya beroperasi berdasarkan siklus waktu tetap, tanpa mempertimbangkan kondisi lalu lintas aktual di lapangan. Pendekatan ini seringkali menyebabkan pemborosan waktu yang signifikan bagi pengendara dan pejalan kaki. Permasalahan ini muncul karena lampu lalu lintas konvensional tidak menggunakan sistem tambahan apapun untuk beradaptasi dengan kondisi lalu lintas yang sebenarnya, seperti kepadatan kendaraan atau keberadaan pejalan kaki di persimpangan. Akibatnya, pengendara dan pejalan kaki seringkali terjebak dalam waktu tunggu yang tidak perlu, bahkan ketika tidak ada lalu lintas dari arah lain yang memerlukan prioritas atau ketika arah lain sudah kosong
Selain inefisiensi inheren dari sistem berbasis waktu tetap, lampu lalu lintas yang diawasi secara manual oleh pihak berwenang memiliki keterbatasan krusial: mereka tidak dapat dipantau dan diatur secara terus-menerus selama 24 jam. Keterbatasan ini berarti bahwa pada jam-jam tertentu, terutama di luar jam kerja puncak atau di area dengan pengawasan terbatas, efisiensi dan keamanan lalu lintas dapat terganggu karena tidak adanya penyesuaian waktu nyata terhadap perubahan kondisi lalu lintas yang dinamis. Hal ini menciptakan celah dalam manajemen lalu lintas yang dapat dimanfaatkan oleh kondisi tak terduga atau pola lalu lintas yang tidak biasa.
Adaptive Traffic Light System merupakan
inovasi terbaru yang memanfaatkan teknologi sensor untuk meningkatkan
efektivitas dan menghemat waktu ketika berada di Traffic Light. Perangkat ini
dirancang sebagai modul keempat dalam Praktikum Up & Uc, dengan tujuan
memberikan efisiensi waktu dengan menggunakan teknilogi yang lebih canggih
dibandingkan Traffic Light konvensional yang sudah biasa digunakan. Penggunaan
beberapa sensor dalam Adaptive Traffic Light System
diharapkan dapat meningkatkan tingkat efisiensi waktu dan mengurangi
intervensi manual.
Perangkap ini menggunakan beberapa jenis sensor yang bekerja
secara sinergis. Sensor ultrasonic digunakan untuk mendeteksi pengendara di Traffic
Light, memastikan bahwa kendaraan dalam keadaan sepi atau ramai. Sensor ultrasonic
mendeteksi keberadaan pengendara melalui pantulan gelombang ultrasonic,
memberikan sinyal Tingkat ke padatan pengendara. Semakin ramai pengendara
semakin cepat gelombang ultrasonic dipantulkan. Sensor touch tipe resistif mengidentifikasi sentuhan dari pejalan kaki
yang akan menyeberang di traffic light. Sensor LDR digunakan untuk mendeteksi cahaya
yang berasal dari matahari, guna menghidpukan lampu jalanan. Setiap sensor
saling akurasi sistem.
Perangkat ini memiliki beberapa output untuk mengoperasikan
perangkap secara otomatis. LED RGB digunakan sebagai pengganti lampu lalu
lintas. Motor berfungsi untuk memutar sensor ultrasonic agar cangkupan deteksi
;ebih lebar. OLED digunakan sebagai penanda visual bahwa pejalan kaki akan
menyebrang atau kendaraan yang diperbolehkan melaju.
Dibandingkan dengan Traffic light konvensional yang biasanya
tidak menggunakan system tambahan apapun, Adaptive Traffic Light System ini
menawarkan solusi yang lebih modern. Traffic light konvensional sering kali membuang-buang
waktu pengendara dan pejalan kaki yang terjebak di dalamnya.. Sementara itu, traffic
light yang diawasi manual oleh pihak berwenang memiliki keterbatasan dimana tidak
dapat dipantau terus menerus selama 24 jam. Kombinasi berbagai sensor dalam Adaptive
Traffic Light System ini bertujuan untuk mengatasi kelemahan tersebut.
Dengan memanfaatkan teknologi sensor yang canggih, Adaptive
Traffic Light System ini diharapkan dapat
menjadi solusi yang lebih efektif dan efisien dalam mengatasi traffic light ,
memberikan kenyamanan dan menghemat banyak waktu bagi pengendara dan pejalan
kaki.
2. Tujuan [Kembali]
A.Meningkatkan
Efektivitas dan Efisiensi waktu saat berada di traffic light : Mengembangkan Adaptive
Traffic Light System yang
lebih efektif dengan memanfaatkan kombinasi berbagai sensor untuk mengurangi waktu terjebak di dalam traffic light.
B. Mengurangi
Keterlibatan Manual dan meningkatkan pengawasan : Merancang sistem adaptive yang
bekerja secara otomatis, dan mengurangi kebutuhan intervensi manual, sehingga meningkatkan keamanan dan kenyamanan pengendara.
C.Memberikan
Notifikasi yang Jelas dan Cepat: Menyediakan indikator visual untuk memberi tahu pengendara segera setelah perubahan traffic terjadi secara otomatis, memungkinkan pengendara untuk mengenali perubahan traffic dengan lebih mudah dipahami.
D.
Mengoptimalkan
Penggunaan Teknologi Sensor: Mengevaluasi dan mengoptimalkan kinerja
berbagai sensor dalam aplikasi nyata, memahami kelebihan dan kekurangannya,
serta menawarkan solusi teknologi yang terintegrasi dan mudah digunakan untuk
pengendalian tikus di rumah.
3. Alat dan Bahan [Kembali]
3.1. Alat
3.1.1 Multimeter
Gambar 1. Digital Multimeter Multimeter adalah alat ukur elektronik yang digunakan untuk mengukur berbagai parameter listrik seperti tegangan (volt), arus (ampere), dan resistansi (ohm). Multimeter dapat berbentuk digital maupun analog. Berikut merupakan fungsi dari multimeter:
a. Mengukur Tegangan (Voltage): Multimeter dapat mengukur tegangan listrik dalam rangkaian, baik tegangan searah (DC) maupun tegangan bolak-balik (AC). Rentang pengukuran tegangan biasanya berkisar dari milivolt (mV) hingga ratusan volt (V).
b. Mengukur Arus (Current): Multimeter dapat mengukur aliran arus listrik dalam rangkaian. Multimeter digital dapat mengukur arus DC dan AC dengan rentang dari mikroampere (µA) hingga ampere (A). Untuk mengukur arus, multimeter harus disambungkan secara seri dengan rangkaian.
c. Mengukur Resistansi (Resistance): Multimeter dapat mengukur hambatan dalam komponen atau rangkaian. Satuan resistansi adalah ohm (Ω), dengan rentang pengukuran dari ohm hingga megaohm (MΩ).
d. Pengukuran Tambahan: Beberapa multimeter dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi (farad), frekuensi (hertz), suhu (derajat Celsius atau Fahrenheit), serta tes dioda dan kontinuitas.
Multimeter terbagi menjadi dua jenis utama, yaitu analog dan digital. Multimeter analog menggunakan jarum yang bergerak pada skala untuk menunjukkan nilai pengukuran. Kelebihannya termasuk kemampuan menunjukkan perubahan cepat dalam sinyal dan tidak memerlukan baterai untuk mengukur tegangan dan arus. Namun, multimeter analog cenderung kurang akurat dan lebih sulit dibaca dibandingkan dengan multimeter digital.
Sebaliknya, multimeter digital menampilkan hasil pengukuran dalam bentuk angka pada layar LCD, menawarkan kemudahan baca dan akurasi yang lebih tinggi. Multimeter digital sering dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi, frekuensi, dan suhu. Meskipun biasanya lebih mahal dan membutuhkan baterai untuk semua jenis pengukuran, multimeter digital menyediakan keunggulan dalam kemudahan penggunaan dan keakuratan. Fitur auto-ranging pada multimeter digital juga menambah kepraktisan, dengan secara otomatis memilih rentang pengukuran yang sesuai, sehingga mengurangi risiko kesalahan pengukuran dan kerusakan alat. Berikut ini merupakan cara menggunakan multimeter:
a. Pilih Mode Pengukuran:
Langkah pertama dalam menggunakan multimeter adalah menentukan jenis pengukuran yang ingin dilakukan. Setel sakelar pada multimeter ke mode pengukuran yang diinginkan, apakah itu tegangan (volt), arus (ampere), atau resistansi (ohm). Pemilihan mode yang tepat sangat penting untuk mendapatkan hasil pengukuran yang akurat dan mencegah kerusakan pada multimeter.
b. Hubungkan Probes:
Setelah mode pengukuran dipilih, langkah berikutnya adalah menghubungkan probe. Sambungkan probe merah ke terminal positif pada multimeter dan probe hitam ke terminal negatif. Kemudian, tempatkan ujung probe pada titik-titik yang akan diukur dalam rangkaian. Pastikan sambungan dilakukan dengan benar untuk menghindari kesalahan pengukuran dan untuk melindungi pengguna dari potensi bahaya listrik.
c. Baca Nilai:
Setelah probes terhubung dengan benar, hasil pengukuran akan ditampilkan pada multimeter. Pada multimeter digital (DMM), nilai pengukuran akan muncul dalam bentuk angka pada layar LCD, yang memberikan pembacaan yang jelas dan akurat. Pada multimeter analog, hasil pengukuran akan ditunjukkan oleh jarum yang bergerak pada skala. Penting untuk membaca nilai dengan cermat dan memastikan jarum atau angka berada dalam rentang yang benar sesuai dengan pengaturan mode pengukuran yang telah dipilih.
3.1.2 Solder
Gambar 2. Solder
Solder adalah alat yang digunakan untuk menggabungkan komponen elektronik atau logam dengan cara memanaskan dan melelehkan bahan solder sehingga dapat mengikat komponen yang akan disambung. Solder terdiri dari beberapa komponen utama, yaitu besi solder, timah solder, dan flux. Besi solder, atau soldering iron, adalah alat yang dipanaskan listrik untuk melelehkan timah solder. Ujung besi solder, yang disebut mata solder, terbuat dari logam tahan panas dan dirancang untuk mentransfer panas secara efisien ke titik penyolderan.
Timah solder adalah paduan logam yang digunakan sebagai bahan pengikat dalam penyolderan. Timah solder tradisional terdiri dari campuran timah dan timbal, namun dengan meningkatnya kesadaran akan isu kesehatan dan lingkungan, kini banyak digunakan timah solder bebas timbal yang lebih aman. Timah solder biasanya memiliki inti yang berisi flux, yaitu zat kimia yang membantu menghilangkan oksida dari permukaan logam yang akan disolder, sehingga meningkatkan ikatan logam yang kuat dan tahan lama.
Proses penyolderan dimulai dengan memanaskan besi solder hingga mencapai suhu yang cukup untuk melelehkan timah solder. Setelah besi solder panas, ujung mata solder ditempatkan pada titik sambungan, lalu timah solder diaplikasikan ke titik tersebut hingga meleleh dan mengalir mengikat komponen yang disambung. Penting untuk memastikan bahwa kedua permukaan yang disambung cukup panas untuk memastikan sambungan yang kuat dan mencegah sambungan yang dingin (cold joint), yang dapat menyebabkan kegagalan sambungan listrik.
3.1.3
Adaptor
Gambar 3. Baterai
Adaptor adalah perangkat elektronik yang berfungsi mengubah tegangan listrik AC (arus bolak-balik) dari sumber listrik utama menjadi tegangan DC (arus searah) yang lebih rendah. Adaptor ini terdiri dari komponen internal seperti transformator untuk menurunkan tegangan, penyearah untuk mengubah AC menjadi DC, dan kapasitor serta regulator untuk menghaluskan dan menstabilkan tegangan keluaran. Saat adaptor dicolokkan ke stop kontak dan dihubungkan ke perangkat, ia menyediakan daya listrik yang sesuai untuk mengoperasikan atau mengisi ulang perangkat tersebut. Adaptor umumnya digunakan untuk berbagai perangkat elektronik yang membutuhkan daya rendah hingga menengah. Meskipun fungsi utamanya sama, adaptor dapat memiliki berbagai ukuran dan bentuk konektor keluaran yang berbeda, disesuaikan dengan kebutuhan perangkat yang akan dihubungkan. Adaptor ini krusial dalam menyediakan daya yang aman dan stabil, melindungi perangkat elektronik dari kerusakan akibat tegangan yang tidak sesuai.
Spesifikasi :
Input : AC100-240V 50/60Hz
Output : DC 9V 2A
3.1.4 PCB (Printed Circuit Board)
Gambar 4. PCB
PCB (Printed Circuit Board) adalah papan sirkuit yang digunakan untuk menghubungkan dan mendukung komponen elektronik secara permanen dalam suatu rangkaian. Berbeda dengan breadboard, PCB dibuat dengan jalur konduktor dari tembaga yang tercetak di atas substrat isolator, biasanya berbahan fiberglass atau resin, sehingga memungkinkan hubungan listrik yang lebih stabil dan presisi. PCB umumnya dibuat menggunakan desain khusus yang disesuaikan dengan fungsi rangkaian, dan dapat memiliki satu lapisan (single layer), dua lapisan (double layer), atau bahkan beberapa lapisan (multilayer) untuk rangkaian yang kompleks. Komponen elektronik seperti resistor, kapasitor, IC, dan konektor dipasang pada papan ini dan disolder untuk menciptakan hubungan listrik yang kuat dan tahan lama. PCB banyak digunakan dalam perangkat elektronik komersial maupun proyek DIY tingkat lanjut karena memberikan keandalan, ketahanan, serta kemampuan untuk diproduksi massal.
3.1.5 Breadboard
Gambar 4. Breadboard
Breadboard adalah perangkat yang digunakan untuk membuat rangkaian elektronik sementara dan prototipe tanpa perlu menyolder komponen. Alat ini terdiri dari papan dengan lubang-lubang kecil yang terhubung secara elektrik, memungkinkan pengguna untuk memasukkan dan menghubungkan komponen seperti resistor, kapasitor, transistor, dan IC dengan mudah. Breadboard memiliki dua bagian utama: bagian tengah yang digunakan untuk menempatkan komponen, dan bagian samping yang biasanya digunakan untuk distribusi daya. Alat ini sangat berguna dalam tahap pengembangan dan pengujian karena memungkinkan modifikasi dan perbaikan rangkaian dengan cepat dan efisien. Breadboard hadir dalam berbagai ukuran, memungkinkan fleksibilitas dalam pembuatan prototipe untuk berbagai proyek elektronik.
3.1.6 Kabel Jumper
Gambar 5. Kabel Jumper
Kabel jumper adalah kabel kecil yang digunakan untuk menghubungkan komponen-komponen elektronik pada sebuah papan sirkuit atau breadboard. Kabel ini memiliki konektor di kedua ujungnya, yang dapat berupa male (jantan) atau female (betina). Kabel jumper sangat penting dalam perancangan dan pengujian sirkuit elektronik karena memudahkan pembuatan koneksi sementara tanpa perlu menyolder komponen. Jenis-jenis kabel jumper meliputi:
a. Kabel Jumper Male-to-Male (M-M): Kabel ini memiliki konektor male di kedua ujungnya. Digunakan untuk menghubungkan dua titik pada breadboard atau menghubungkan titik pada breadboard dengan pin header pada mikrokontroler atau modul.
b. Kabel Jumper Male-to-Female (M-F): Kabel ini memiliki konektor male di satu ujung dan konektor female di ujung lainnya. Biasanya digunakan untuk menghubungkan pin header pada mikrokontroler atau modul dengan perangkat yang memiliki konektor male.
c. Kabel Jumper Female-to-Female (F-F): Kabel ini memiliki konektor female di kedua ujungnya. Umumnya digunakan untuk menghubungkan dua perangkat yang memiliki konektor male, seperti menghubungkan modul sensor dengan mikrokontroler.
3.1.7 Ultrasonic Sensor Mounting Bracket Holder
Ultrasonic Sensor Mounting Bracket Holder adalah aksesori yang dirancang untuk memudahkan pemasangan dan penempatan sensor ultrasonik pada berbagai proyek elektronika dan robotika. Alat ini biasanya terbuat dari bahan plastik atau logam ringan yang tahan lama, dengan desain yang kompak dan dilengkapi lubang pemasangan sesuai ukuran sensor ultrasonik seperti HC-SR04 atau US-015. Bracket ini memungkinkan sensor dipasang secara stabil dan dapat disesuaikan sudut atau posisinya untuk mendukung akurasi pengukuran jarak. Dengan menggunakan mounting bracket, sensor dapat lebih mudah diintegrasikan ke dalam rangka robot, drone, atau sistem pendeteksi halangan lainnya, sehingga meningkatkan stabilitas dan fungsionalitas dalam aplikasi lapangan.
3.2 Komponen
3.2.1 Mikrokontroler
Keluarga mikrokontroler STM32F103xx kategori performance line berkepadatan menengah mencakup inti Arm® Cortex®-M3 32-bit RISC berkinerja tinggi yang beroperasi pada frekuensi 72 MHz, memori tertanam berkecepatan tinggi (Flash memory hingga 128 KB dan SRAM hingga 20 KB), serta berbagai macam peripheral I/O dan antarmuka yang terhubung ke dua bus APB. Semua perangkat dalam keluarga ini menyediakan dua konverter analog-ke-digital (ADC) 12-bit, tiga timer umum 16-bit ditambah satu timer PWM, serta antarmuka komunikasi standar dan lanjutan: hingga dua I2C dan SPI, tiga USART, USB, serta CAN.
Perangkat ini bekerja dengan sumber daya 2,0 hingga 3,6 V. Tersedia dalam rentang suhu –40 hingga +85 °C dan juga rentang suhu diperluas dari –40 hingga +105 °C. Sejumlah besar mode penghemat daya tersedia untuk membantu merancang aplikasi hemat energi.
Keluarga STM32F103xx dalam kategori performance line dengan kepadatan menengah tersedia dalam enam jenis kemasan berbeda: mulai dari 36 pin hingga 100 pin. Bergantung pada perangkat yang dipilih, fitur peripheral yang disertakan akan berbeda-beda. Deskripsi di atas memberikan gambaran menyeluruh mengenai rangkaian peripheral yang tersedia dalam keluarga mikrokontroler ini.
Fitur-fitur tersebut menjadikan keluarga mikrokontroler STM32F103xx cocok digunakan untuk berbagai aplikasi seperti penggerak motor (motor drives), kontrol aplikasi, peralatan medis dan portabel, peripheral PC dan game, platform GPS, aplikasi industri, PLC (Programmable Logic Controller), inverter, printer, scanner, sistem alarm, video interkom, serta HVAC (pemanas, ventilasi, dan pendingin).
spesifikasi :
3.2.2 Ultrasonic Sensor
ultrasonic sensor
Sensor ultrasonik adalah perangkat yang digunakan untuk mendeteksi jarak atau keberadaan objek dengan memanfaatkan gelombang suara frekuensi tinggi (biasanya sekitar 40 kHz). Prinsip kerjanya berdasarkan pengiriman dan penerimaan pulsa ultrasonik; sensor mengirimkan gelombang ultrasonik ke arah objek, lalu mengukur waktu yang diperlukan gelombang tersebut untuk dipantulkan kembali ke sensor. Dengan mengetahui kecepatan suara di udara (sekitar 343 m/s pada suhu kamar), mikrokontroler dapat menghitung jarak objek berdasarkan selisih waktu antara pengiriman dan penerimaan sinyal.
Sensor ultrasonik banyak digunakan dalam berbagai aplikasi seperti sistem parkir kendaraan, robot navigasi, deteksi tingkat cairan, kontrol gerbang otomatis, serta sistem keselamatan industri. Sensor ini memiliki keunggulan dalam hal kemampuan mendeteksi jarak tanpa kontak secara akurat, tidak terpengaruh oleh kondisi pencahayaan, serta relatif murah dibandingkan sensor laser atau inframerah. Namun, sensor ini memiliki keterbatasan dalam resolusi sudut dan bisa terganggu oleh permukaan objek yang menyerap suara atau lingkungan yang sangat bising secara akustik. konsumsi daya yang rendah dan beragamnya mode hemat energi membuat mikrokontroler ini cocok untuk aplikasi embedded yang menggunakan sensor ultrasonik dalam sistem portabel atau IoT.
Spesifikasi dari Sensor Ultrasonic :
· Tegangan : 5V DC
· Arus statis : < 2mA
· Level output : 5v – 0V
· Sudut sensor : < 15 derajat
· Jarak yg bisa dideteksi : 2cm – 450cm (4.5m)
· Tingkat keakuratan : up to 0.3cm (3mm)
Sensor sentuh (touch sensor) adalah jenis perangkat antarmuka yang digunakan untuk mendeteksi keberadaan dan lokasi sentuhan pada permukaannya, biasanya oleh jari pengguna atau stylus. Sensor ini bekerja berdasarkan prinsip kapasitif atau resistif, di mana sensor kapasitif lebih umum digunakan dalam aplikasi modern karena akurasi dan responsivitasnya yang tinggi. Sensor sentuh kapasitif mendeteksi perubahan kapasitas listrik ketika jari menyentuh permukaan sensor, sedangkan sensor resistif menggunakan tekanan fisik untuk menghubungkan dua lapisan konduktif. Touch sensor banyak digunakan dalam antarmuka manusia-mesin (HMI), seperti layar sentuh pada perangkat elektronik konsumen, panel kontrol industri, peralatan medis portabel, serta perangkat IoT. Sensor ini memungkinkan interaksi intuitif dan efisien dengan sistem, serta dapat dikombinasikan dengan fitur lain seperti gesture control atau deteksi multi-sentuh tergantung pada jenis dan kemampuan sensor yang digunakan.
spesifikasi

Sensor LDR (Light Dependent Resistor) adalah komponen elektronik yang nilai resistansinya berubah secara proporsional terhadap intensitas cahaya yang diterimanya. Prinsip kerjanya didasarkan pada sifat semikonduktor yang peka terhadap cahaya; ketika cahaya mengenai permukaan LDR, energi foton diserap oleh material semikonduktor sehingga meningkatkan jumlah pembawa muatan dan menurunkan nilai hambatan listrik. Dalam sistem berbasis mikrokontroler, sensor LDR biasanya digunakan bersama dengan rangkaian pembagi tegangan untuk menghasilkan tegangan analog yang dapat dibaca melalui saluran ADC (Analog-to-Digital Converter).
Sensor LDR banyak digunakan dalam aplikasi yang membutuhkan deteksi tingkat pencahayaan, seperti kontrol lampu otomatis (lighting control), sistem keamanan, pengukuran intensitas cahaya dalam perangkat medis portabel, serta aplikasi IoT seperti smart home dan smart agriculture. Karena sifatnya yang tidak linier dan memiliki respons yang relatif lambat dibandingkan photodiode atau phototransistor, LDR lebih cocok digunakan dalam aplikasi yang tidak memerlukan respon cepat atau akurasi sangat tinggi. konsumsi daya yang rendah dalam berbagai mode operasi membuat mikrokontroler ini ideal untuk aplikasi bertenaga baterai yang menggunakan sensor LDR sebagai elemen input lingkungan.
spesifikasi
Adapun spesifikasi dari LDR adalah:
● Tegangan maksimum (DC): 150V.
● Konsumsi arus maksimum: 100mW.
● Tingkatan Resistansi/Tahanan : 10Ω sampai 100KΩ
● Puncak spektral: 540nm (ukuran gelombang cahaya)
● Waktu Respon Sensor : 20ms – 30ms.
3.2.5 LED
LED Green
LED yellow
LED, singkatan dari Light Emitting Diode, adalah perangkat semikonduktor yang memancarkan cahaya ketika arus listrik mengalir melaluinya. Prinsip kerja LED didasarkan pada elektroluminesensi, yaitu fenomena di mana material tertentu memancarkan cahaya saat dikenai arus listrik. LED terbuat dari bahan semikonduktor seperti gallium arsenide atau gallium phosphide, yang dikombinasikan dengan elemen lain untuk menghasilkan berbagai warna cahaya.
3.2.6 OLED
OLED (Organic Light-Emitting Diode) adalah teknologi layar tampilan yang menggunakan bahan organik untuk menghasilkan cahaya ketika dialiri arus listrik. Berbeda dengan LCD, OLED tidak memerlukan backlight karena setiap pikselnya mampu memancarkan cahaya sendiri. Layar OLED tersusun dari lapisan-lapisan tipis material organik yang dipasang di antara dua elektroda, salah satunya transparan. Ketika arus mengalir, material organik ini memancarkan cahaya dalam berbagai warna tergantung komposisi bahan penyusunnya. Teknologi ini memungkinkan kontras tinggi, warna yang lebih akurat, serta sudut pandang yang luas. Selain itu, OLED memiliki waktu respons yang cepat dan konsumsi daya yang lebih rendah dibandingkan LCD, menjadikannya pilihan populer untuk perangkat seperti smartphone, televisi, dan perangkat wearable.
Spesifikasi:
- Interface: I2C (3.3V / 5V logic level)
- Resolusi: 128 x 64
- Sudut Pandang: ±160 derajat
- Warna: Kombinasi Kuning dan Biru
- Power supply: DC 3.3V~5V
Operating temperature: -20°C~70°C
Ukuran LCD/Board: 2.7 x 2.7 cm
3.2.7 Motor servo
Motor servo adalah perangkat elektromekanis yang digunakan untuk mengontrol posisi sudut secara presisi. Motor servo umumnya digunakan dalam aplikasi yang memerlukan kontrol posisi yang tepat, seperti dalam robotika, model pesawat terbang, dan berbagai perangkat otomasi. Motor servo biasanya dioperasikan pada tegangan +5V dan memiliki torsi sebesar 2.5 kg/cm. Kecepatan operasionalnya adalah 0.1 detik per 60° dengan tipe gigi plastik, yang memastikan operasi yang halus dan presisi. Rentang rotasi motor servo adalah dari 0° hingga 180°, memungkinkan pergerakan dalam setengah lingkaran penuh. Berat motor servo adalah 9 gram, membuatnya ringan dan mudah dipasang pada berbagai proyek. Paket motor servo biasanya dilengkapi dengan gear horns dan sekrup untuk memudahkan pemasangan dan integrasi dalam sistem.
spesifikasi :
Tegangan Kerja: 4.8V - 6V
Torsi Stall: 1.8 kg/cm
Kecepatan Tanpa Beban: 0.12 s/60 derajat
Sudut Operasi: 180 derajat
Berat: sekitar 9 gram
Dimensi: 22.2 x 11.8 x 31mm (L x W x H)
Sinyal Kontrol: PWM (Pulse Width Modulation)
3.2.8 Resistor

Resistor adalah komponen elektronika pasif yang berfungsi untuk menghambat aliran arus listrik dalam suatu rangkaian. Dengan mengatur besarnya hambatan, resistor dapat digunakan untuk mengontrol tegangan dan arus sesuai kebutuhan rangkaian. Resistor umumnya tersedia dalam berbagai nilai hambatan yang dinyatakan dalam satuan ohm (Ω), dan nilainya dapat dibaca melalui kode warna pada tubuh resistor atau melalui label pada resistor SMD. Bentuk fisik resistor bervariasi tergantung jenisnya, seperti resistor karbon, film logam, dan resistor variabel. Selain itu, resistor juga memiliki spesifikasi daya yang dinyatakan dalam watt (W), yang menunjukkan kemampuannya dalam menahan panas akibat aliran arus listrik. Ukuran fisik resistor biasanya kecil sehingga mudah dipasang pada berbagai jenis papan rangkaian, baik untuk proyek elektronika sederhana maupun perangkat elektronik kompleks.
Spesifikasi :Resistance (ohms) : 10K, 500K
Power (Watts) : 0.25W, 1/4W
Tolerance : -+ 5%
Packaging : Bulk
Composition : Carbon Film
Temperature Coefficient : 350 ppm/C
Lead free status : Lead free
RoHS status : RoHS Compliant
3.2.9 Modul Step Down XL4005
Modul step-down XL4005 adalah perangkat elektronik yang berfungsi untuk menurunkan tegangan arus searah dari nilai input yang lebih tinggi menjadi nilai output yang lebih rendah, sesuai kebutuhan. Modul ini didasarkan pada chip XL4005 yang merupakan konverter DC-DC jenis buck (penurun tegangan) yang sangat efisien. Modul ini dilengkapi dengan komponen-komponen pendukung seperti induktor, kapasitor, dan dioda, serta sebuah trimpot (potensiometer variabel) yang memungkinkan pengguna untuk mengatur tegangan output secara presisi. Saat modul ini diberi tegangan input DC (umumnya antara 5V hingga 32V), ia akan mengolahnya untuk menghasilkan tegangan output DC yang dapat diatur dari 0.8V hingga 24V, dengan kapasitas arus hingga 5 Ampere . Modul step-down XL4005 memainkan peran penting dalam berbagai aplikasi elektronik yang membutuhkan penurunan tegangan secara efisien, seperti catu daya untuk mikrokontroler, pengisian daya baterai lithium, power supply untuk perangkat elektronik portabel, atau sebagai regulator tegangan pada sistem tenaga surya.
Spesifikasi module LX4005
Input tegangan 4.0~32V
Output tegangan 0.8~30V adjustable
Keluaran arus max 5A rekomendasi 4.5A
Daya keluaran 75W labih dari 50W gunakanlah heatsink
Evesiensi konversi hingga 96%
Frekuensi oprasi 180KHz
Ukuran 44x21 mm
Suhu oprasi -40 ~ +85
4. Dasar Teori [Kembali]
A. PWM (Pulse Width Modulation)
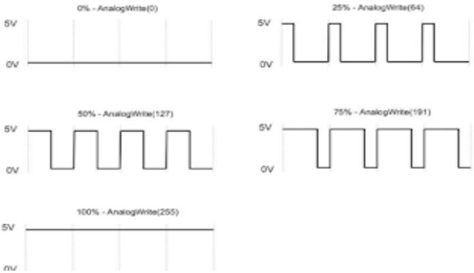
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
• Duty Cycle = tON / ttotal

• tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
• tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
• ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();. PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 x 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
B. ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);.
C. Komunikasi
a. Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal. Cara Kerja Komunikasi UART: Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
Cara Kerja Komunikasi UART adalah Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
b. Serial Peripheral Interface (SPI)
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroler maupun antara mikrokontroler dengan peripheral lain di luar mikrokontroler.
- MOSI: Master Output Slave Input artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
- MISO: Master Input Slave Output artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
- SCLK: Clock jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
- SS/CS: Slave Select / Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.

Cara Kerja Komunikasi SPI: Sinyal clock dialirkan dari master ke slave yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer data ke master melalui MISO.
c. Inter Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.
Cara Kerja Komunikasi I2C: Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop. Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL. Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL. R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0= mengirim data ke slave, logika 1 = meminta data dari slave). ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
a. Prosedur [Kembali]
1. Persiapkan Alat dan Bahan
STM32 (2 buah)Ultrasonic Sensor (3 buah)Touch Sensor (3 buah)LDR Sensor (1 buah)OLED (3 buah)Servo Motor (3 buah)Kabel Jumper secukupnyaPCboard secukupnyaSoftware Arduino IDE (terbaru)Resistor (secukupnya)LED RGB (secukupnya)Ultrasonic Sensor Mounting Bracket Holder (3 buah)2. Rangkai Komponen:
- Hubungkan pin LDR sensor ke STM32A pada pin A0
- Hubungkan pin A1 STM32A dengan resistor kemudian hubungkan resistor ke LED White 1 dan hubungkan ke Ground
- Hubungkan pin A2 STM32A dengan resistor kemudian hubungkan resistor ke LED White 2 dan hubungkan ke Ground
- Hubungkan pin A3 STM32A dengan resistor kemudian hubungkan resistor ke LED White 3 dan hubungkan ke Ground
- Hubungkan pin out Touch sensor 1 ke STM32A pada pin A6
- Hubungkan pin out Touch sensor 2 ke STM32A pada pin A7
- Hubungkan pin out Touch sensor 3 ke STM32A pada pin B9
- Hubungkan pin trigger ultrasonic sensor 1 ke STM32B pada pin A0
- Hubungkan pin echo ultrasonic sensor 1 ke STM32B pin A1
- Hubungkan pin A2 STM32B dengan resistor kemudian hubungkan resistor ke LED Red 1 dan hubungkan ke Ground
- Hubungkan pin A3 STM32B dengan resistor kemudian hubungkan resistor ke LED Yellow 1 dan hubungkan ke Ground
- Hubungkan pin A4 STM32B dengan resistor kemudian hubungkan resistor ke LED Green 1 dan hubungkan ke Ground
- Hubungkan pin trigger ultrasonic sensor 2 ke STM32B pada pin B0
- Hubungkan pin echo ultrasonic sensor 2 ke STM32B pin B1
- Hubungkan Pin A5 STM32B dengan motor Servo1
- Hubungkan Pin A6 STM32B OLED LCD 1
- Hubungkan Pin A7 STM32B OLED LCD 2
- Hubungkan Pin A8 STM32B OLED LCD 3
- Hubungkan pin trigger ultrasonic sensor 1 ke STM32B pada pin B0
- Hubungkan pin echo ultrasonic sensor 1 ke STM32B pin B1
- Hubungkan pin B6 STM32A dengan pin B6 STM32B
- Hubungkan pin B7 STM32A dengan pin B6 STM32B
- Hubungkan Pin B8 STM32B dengan motor Servo2
- Hubungkan pin B10 STM32B dengan resistor kemudian hubungkan resistor ke LED Red 2 dan hubungkan ke Ground
- Hubungkan pin B11 STM32B dengan resistor kemudian hubungkan resistor ke LED Yellow 2 dan hubungkan ke Ground
- Hubungkan pin B12 STM32B dengan resistor kemudian hubungkan resistor ke LED Green 2 dan hubungkan ke Ground
- Hubungkan Pin B13 STM32B dengan motor Servo2
- Hubungkan pin trigger ultrasonic sensor 1 ke STM32B pada pin B14
- Hubungkan pin echo ultrasonic sensor 1 ke STM32B pin B15
- Hubungkan pin C13 STM32B dengan resistor kemudian hubungkan resistor ke LED Red 3 dan hubungkan ke Ground
- Hubungkan pin C14 STM32B dengan resistor kemudian hubungkan resistor ke LED Yellow 3 dan hubungkan ke Ground
- Hubungkan pin C15 STM32B dengan resistor kemudian hubungkan resistor ke LED Green 3 dan hubungkan ke Ground
3. Masukkan program arduinomaster STM32A:
Buka Arduino IDE dan buat file baru.
Copy dan paste kode untuk STM32A
4. Masukkan program arduinomaster STM32B:
Buka Arduino IDE dan buat file baru.
Copy dan paste kode untuk STM32B
5. Upload Program ke Arduino:
- Sambungkan STM32 1 ke komputer dengan kabel USB dan upload program untuk STM32A.
- Sambungkan STM32 2 ke komputer dengan kabel USB dan upload program untuk STM32B.
6. Uji Coba Rangkaian:
- Setelah selesai meng-upload program, pasangkan semua komponen sesuai rangkaian yang telah dibuat.
- Pastikan servo motor bergerak sesuai dengan kondisi yang diterima.
b. Hardware [Kembali]
Prototype adaptive traffic light system
c. Rangkaian Simulasi dan Prinsip Kerja [Kembali]
Simulasi Proteus Rangkaian
Prinsip Kerja :
Pada adaptive traffic light system ini digunakan 2 buah STM32, dengan satu berperan sebagai master dan satu lagi sebagai slave. ke-2 mikrokontroller berkomunukasi menggunakan I2C. sistem ini dilengkapi dengan 3 buah sensor dengan input masing-masing. output dari sistem ini meliputi motor servo, LED RGB dan OLED LCD
Prinsip kerja sistem ini dimulai ketika sensor ultrasonic mendeteksi adanya kendaraan bermotor di persimpangan jalan. saat terdeteksi kendaraan dalam keadaan normal atau sepi maka lampu lalu lalu lintas akan berjalan dalam hitungan normal, yaitu RED 10 detik, YELLOW 3 detik dan GREEN 10 detik. ketika terdeteksi dalam keadaan abnormal atau ramai maka hitungan pada lampu lalu lintas akan berubah, yaitu RED 10 detik, YELLOW 3 detik dan GREEN 15 detik. dimana keadaan dibedakan dari jarak pantulan sensor ultrasonic. keadaan sepi ketika jarak pantulan >50 cm dan keadaan ramai ketika <=50cm. selain itu agar memperluas jangkauan deteksi, sensor ultrasonic dipasangkan pada motor servo dengan menggunakan bracket holder. untuk mengurangi kemungkinan data yang salah, deteksi dilakukan sebanyak 3x dan mengambil nilai rata-ratanya sebagai nilai input.
Sensor touch berperan sebagai fungsi interrupt pada sistem ini. sensor touch yang digunakan merupakan touch sensor tipe resistif. dimana ketika terdapat pejalan kaki yang ingin menyeberang perlu untuk menekan touch sensor. setelah ditekan, touch sensor akan mendeteksi pejalan kaki tersebut, kemudian akan menjalankan fungsi interrupt untuk membuat lampu jalan menjadi berwarna merah sehingga pejalann kaki tersebut dapat menyeberang. selain itu fungsi interrupt tersebut akan membuat tampilan layar OLED LCD berubah menjadi gambar pejalan kaki, dimana kondisi normalnya adalah gambar kendaraan bermotor.
LDR sensor berperan sebagai pendeteksi cahaya matahari. dengan menambahkan rangkaian pull down, membuat keadaan normal dari sensor adalah low. keadaan normal berupa keadaan terang dimana saat lux cahaya > , dimana dalam keadaan ini lampu jalan akan tetap mati. ketika dalam keadaan gelap, saat lux cahaya < lux, maka lampu jalan akan otomatis hidup untuk menberikan penerangan kepada pengendara dan pejalan kaki.
Flowchart STM32 MASTER
Flowchart STM32 SLAVE
e. Video Demo [Kembali]
f. Download File [Kembali]
Download Program STM32 MASTER klik disini
Download Program STM32 SLAVE klik disini
Download Datasheet OLED LCD monitor display klik disini































Tidak ada komentar:
Posting Komentar